大和郡山市総合公園施設多目的体育館 |
S研 | 鶴鶴鶴鶴鶴鶴鶴★ |
地区準優勝 全国ベスト8 |
手動ロボットは脚立型で、両足から伸びるウエイトで重心を大きく前後に移動でき、 倒立まで可能!平均台、ハードルを不安なく越えられる。脚の開閉機構のウオームギアのキュイ〜ンという 減速音が印象的。壁登り自動ロボットは、ゴールできる機構を作り上げたが、それを見せる機会はなかった。 |
|
 はしごくぐり
はしごくぐり 平均台渡り
平均台渡り ハードル越え
ハードル越え スタート
スタート
 はしごくぐり直前
はしごくぐり直前
 はしごくぐり中
はしごくぐり中
 平均台降り
平均台降り
 ハードル越え
ハードル越え
 バトン渡し体勢
バトン渡し体勢
 股関節脱臼!
股関節脱臼! 股関節部分
股関節部分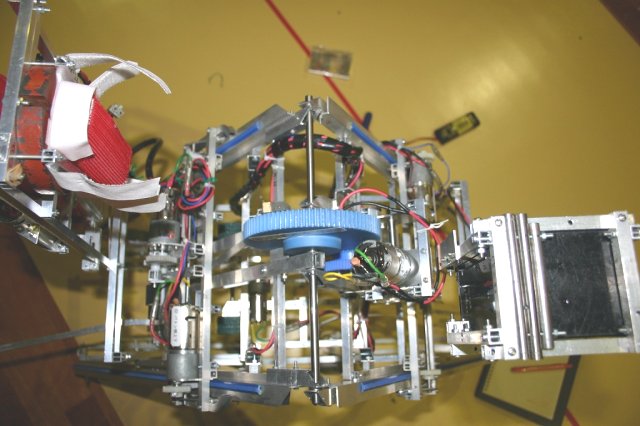 上から見た所
上から見た所 壁への取り付き
壁への取り付き 壁登り中
壁登り中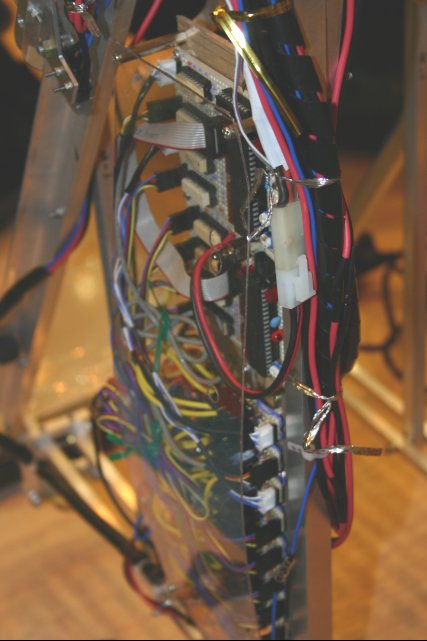 回路部
回路部