Robocon2003 回路設計資料〜パワーMOSFET編〜
この文書は、まぁ、MOSFETでなんとなくモーターを回してきた自分に、今一度、MOSFETとは
いったいなんぞや、と問いかけてみる、みたいな、そんな感じのものです。
なお、このページはIE4.0以上で閲覧することを強く推奨します。
一応、NN7.1、Mozilla1.0.2、Opera7.11では正常表示されました。他では確認したくないです(笑)
0、はじめに
S-ken内では、どうしようもないダメ人間っぷりを発揮したくってる回路屋、kzです。
もうすぐ卒業です。やばいです。っつーことで、なんか資料を残してみようかと。
資料と言うべきなのか判断つきかねますが、、
ええっと、間違っているとことか、もっといい方法があるとか、いろいろ意見いただければ、うれしぃなぁ
とか思っています。
ちなみに、この文書に載せてある回路は、PICマイコンを主に設計しているので、
回路図内のマイコン用端子には、「PIC I/O」と表記されています。
この文書は、未完成な部分を多々残している為、回路、内容等の
保証は一切ありませんのであしからず。
1、MOSFETとな?
ゲートとか言う端子に電圧かけたらドレインとソースとか言う
端子間が導通する、なにか便利なスイッチらしいです。図で描くとこんな感じ。
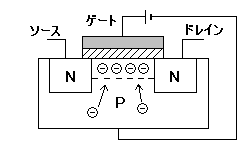
上に書いてあるNで示された領域は、電子(−なもの)の多い半導体(N型半導体)、
Pはホール(+なもの)が多い半導体(P型半導体)です。多いってだけで、
N型半導体にも、ホールは存在し、P型半導体にも、電子は存在します。僅かですけど。
斜線が入ってる
場所は絶縁体で、電流がほとんど流れません。灰色な所は、ただの金属です。
そのただの金属な所に、電池のプラス側を向けて電圧をかけると、P型半導体の中にある
僅かな電子が引き寄せられて、電子がたくさん集まります。電子がたくさん
存在するのがN型半導体だというのなら、そこは、見た目がN型半導体のようになります。
専門用語では反転状態とか言います。
こうなると、両側のN型半導体とくっついてしまうので、ソース、ドレインの間を電流
が流れてくれるわけです。ちなみに、これはNチャネル型という分類のもので、これと
逆なものも存在します(Pチャネル型という)。
、、、、なんちゅう説明や、
2、データシートを見れ
なにか重要な事がいろいろ書いてあるものです。とりあえずは絶対最大定格とやらを
読んでみる。ちなみに、データシートは、HITA○HIのサイトで落としました。(何故に伏字?)
- ● ドレイン・ソース電圧
- ドレイン・ソース間に加えられる最大の電圧。
2SK3142なら、Vds = 30V。
12Vバッテリー使うなら問題な〜し。
- ● ゲート・ソース電圧
- ゲート・ソース間に加えられる最大の電圧。
2SK3142なら、Vgs = ±20V。
12Vバッテリー使うなら問題ないっす。
- ● ドレイン電流
- ドレインに連続で流せる最大の電流。
RS-540Hだと、最大効率時に4A、立ち上がり時に37A。
2SK3142なら、Id = 60Aなので許容範囲内です。オーバースペック
な気が、、
- ● 許容チャネル損失
- 4.2節参照、、(手抜きだなオィ)
あと、電気的特性とか、主特性のグラフ群とか、外形寸法図とか、ご注意とか、いろいろ
書いてますが、そのへんは、他の節で適当に見ていく方向で。
3、MOSFETを動かす回路
3.1 過去を思い出すと、、
私は、過去2年間パワーMOSFETを使って回路を作っていて、こんな誤解をしてました。
「MOSFETのゲートには電流なんざ流れねぇから適当に電圧かけときゃいいや」
そんな誤解の下、こんなフルブリッジ回路(下の図)を作成しました。
よっしゃ、回してみよぉ〜、、、あ、なんか回ってる、おっけーなんじゃないのぉ?
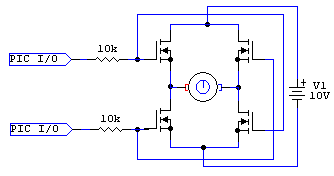
ってな感じで、私は、MOSFET回路を作ってたわけですが、だめだめです。
電流供給できてません。ゆえに、回転が遅かったり、たまに回らなかったりしてました。
ついでにいえば、この回路はバッテリーだけ繋ぐと燃えます。
実はこの回路、何のためらいもなく、2002年ロボコン出場機につんでました。
何の設計もなく「とりあえず」で作った回路をつもうとするあたり、私のヘボ加減が
うかがい知れます(^^;
3.2 ゲート回りの基本回路
さて、そんな訳で、さくっと、ちゃんと動作する回路を作っちゃいましょう。
テーマは、「ゲートに電流を」、内容的には、「えっ、トランジスタっすか」
な感じで、まずはいきなり用語解説。
- ● ゲートライズタイム(単に上昇時間とも表記される)
- ゲートの電位が目標とする電圧に達するまでの時間です。ゲートライズタイムtrは、
tr = 2.2 * Ciss * Rg
Ciss:ゲート入力容量
Rg :信号線の抵抗値
で定義される。この式からもわかる通り、信号線の抵抗値を小さくすれば、
高速にスイッチできることがわかります。
- ● ゲートドライブ電流
- ゲートに流す電流のことで、基本的に平均値で表される。ゲートドライブ電流
Iavは、
Iav = 1/tr * Ciss * Vg
Vg :ゲート電圧
で定義される。この式から、ゲートに供給すべき電流がわかる。ちなみに、Ciss、trは
データシートの電気特性の表に書いてあります。
ほんじゃま、2SK3142とかいうパワーMOSFETを使って、設計していきましょか。
例:2SK3142の場合
データシートより、Ciss = 6800pF ,tr=340nsがわかります。ゲート電圧12Vとすると、
ゲートドライブ電流Iavは、
Iav = 1/340e-9 * 6800e-12 * 12
= 240[mA]
であるとわかります。これより、240mAの電流を流せばドライブ
出来ることがわかります。さすがに、PICのI/Oから直接流してやるのはつらいですよね。
っつーわけで、トランジスタを使って、
電流を供給する回路を作りましょうか。たとえば、バイポーラトランジスタ
2SC1815と2SA1015を用いて、次のような回路を構成したとしましょう。
(この回路は、某高専生さんなサイトにあったものとほぼ同じだったりしますです)
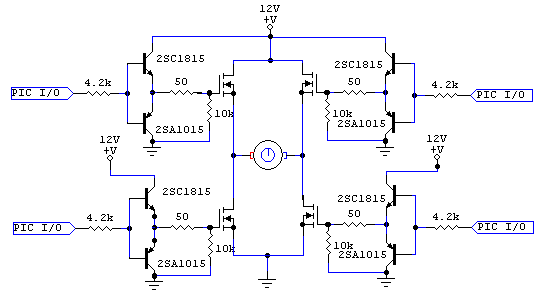
この回路で、トランジスタのhfeが200(GRクラスの最低値)であるとすると、
ベースに直列に入れた抵抗の値は、
Rb = 5/(240e-3/200)
= 4.2kΩ
であるとわかります。でまぁ、駆動電圧が12Vだとすると、ゲートに直列に入れる抵抗
は、
Rg = 12/240e-3
= 50Ω
だとわかります。
なお、電源投入時は、ゲートをOFFにするために、
上の図でゲートとソースの間に抵抗を入れておきます。この値は、
データシートのドレイン遮断電流と、ゲート・ソース間遮断電圧から
求めることが出来ます。2SK3142のドレイン遮断電流は、10μA、
ゲート・ソース間遮断電圧の最小値が1.0Vなので、
Rgl = 1.0 / 10e-6
= 1MΩ
であるが、これだとぎりぎりの設計になってしまうので、余裕をみて
10kΩくらいを用いるのが普通みたいです。なお、ドレイン・ソース
間電圧の最大定格を使わない限りは、先に示した大きさのドレイン電流
が流れる事はないので、それほどシビアになる必要はないと思いますです。
ちょっと用語解説
- ● ドレイン遮断電流
-
ゲート電圧が0Vの状態で、ドレイン・ソース間に電圧を加えると、
僅かながらゲート側に電流が流れる。これを、ドレイン遮断電流と呼んでます。
- ● ゲート・ソース間遮断電圧
-
別名ゲートしきい値電圧と呼ばれ、MOSFETがオンし始める電圧の
事を言います。
ちょっと余談
いろいろ調べてると、フルブリッジの上側のプルダウン抵抗(OFFにするために入れた抵抗)
がモータの端子に接続されているものを見るのだが、あれは何のため何だろう。
ってか、それ以前に上の回路、まだちゃんと検証してないんだよな。ロボコン2003で使ってる
回路はこれより少し回路規模を抑える為に、CMOSロジックICを使ってたりします。4049などの
インバータは、出力段がCMOS(先に示したプッシュプル回路のMOSFET版)なので、4049でMOSFET
をドライブすれば、回路は単純になります。
3.3 絶縁駆動回路
フォトカプラTLP521を用いた場合、受光部側が流せる電流は、最大50mA,推奨10mA
なんです。すなわち、このフォトカプラだと、直に繋いでも駆動に必要な電流が足りていない
事になります。
この場合、先に示したプッシュプル回路を用いるなどして、電流増幅をおこなってやる
必要があります。でも、世の中には便利なものがあるんですよ。フォトカプラには、
パワーMOSFETを駆動することを前提に設計された物が存在するんです。
TLP250は、出力段にアンプとプッシュプル回路を内蔵し、ピーク電流が
最大2Aなので、FETを駆動するのに十分な能力があるとわかります。
ただし、TLP521よりも実装面積を必要だったりします。だって、8ピンで一回路なんだもん。
その他に、フォトボルとかいうのもあります。TLP590だそうです。使ったことないので、
なんともいえませんが。
3.4 リカバリー対策
モーター駆動系の回路には、よくフライホイールダイオードなるものが付いています。
用途は、逆電流からMOSFETを守る為のもので、基本的にドレイン・ソース間に入れます。
データシートのはじめの方に下の図みたいなMOSFETの内部回路が描かれていると思いますが、
どうやら
内部にフライホイールダイオードとして使えそうなのが入ってるじゃないですか。
だから、わざわざ外付けしなくてもいいんじゃないの?
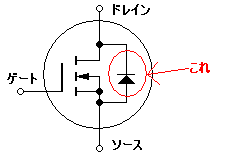
じつは、パワーMOSFET内蔵のダイオードは、
一般整流用ダイオードであり、フライホイールダイオードとして使われる高速ダイオード
じゃ無いんです。その為、モータ駆動回路のようにフライホールダイオードとして用いると、データシート
に記載されている逆回復時間trr分だけ短絡(ショートしちゃう)状態となってしまいます。これを短くする為に、
ファースト・リカバリー・ダイオード(FRD)をフライホイールダイオードとして挿入する
事があります。この場合は、FRDのtrrになる訳ではないが、60%程度短縮できるらしいです。
3.5 誤動作対策
はぁ、さすがにこの文章量は疲れる、、ここは理屈抜きに対策だけ書いとこ(オィ
- (1) FETにゲート抵抗を入れる場合、必ず全てのFETのゲートに入れる
-
3.1節で示した、あのだめだめな回路みたいに、抵抗一本で二つのゲートに入力
するような回路だと、発振するらしいです。詳しくは文献1とか読んで!
- (2) ゲートの信号ラインは、太く、でかく
-
これは、配線が含むインダクタンスLとMOSFETのCissとでLC共振回路が形成
され、ノイズを発生させるからです。もちろん、詳しくは文献1とか読んで!
MOSFETとは直接関係ありませんが、ドライブ回路(マイコンとか)などの電源が不安定な状態(電圧下がってきたとか)
だと、誤動作が増えてきます。これは基本ですが、意外に気づかなかったりします。
4、なぜに燃える?
4.1 燃える要因
この2年くらいでいったいどれくらいのFETを燃やしただろうか・・。
っと、そんな訳で、FETが燃える原因についてまとめると、
- FETの絶対定格を超えた
- 誤動作や配線ミス等で、短絡した
まだあるかもしれないが、私の知る限りこれ以外の原因では燃えません。ってか、FETって
短絡とかで煙を出した後でも、何食わぬ顔で動くんですよね。
4.2 最大定格は超えちゃだめ
ドレイン電流、ドレイン・ソース間電圧、許容チャネル損失は、超えては駄目です。
2SK3142でブリッジ回路を組んだと仮定して、モータがRS-540の場合、流れる電流は
空転時に1.5A、最大負荷時に5A、起動時に37Aなので、2SK3142のドレイン電流60Aはクリア
している。また、RS-540の最大定格電圧は12Vなので、ドレイン・ソース間電圧30Vもクリア
している。なら、許容チャネル損失か?ってか許容チャネル損失ってなに?
- ● 許容チャネル損失(文献1から引用)
-
素子内で消費し得る電力の最大値で、印加電圧と流れる電流の積で表す。
ケース温度Tcが25℃の時、素子内で許容損失電力Ptotを消費すると、
接合温度が150℃になる。言い換えると、Tcが150℃であれば、Ptotは0
である。
なので、電圧一定の場合、温度が上昇すれば流せる電流は次第に小さくなります。
しかし、モータを回そうとすれば電流が流れる訳で、温度が上昇すれば、
しまいに許容チャンネル損失の最大定格を超えてしまいます。
なので、冷却しましょう。具体的には、
- ヒートシンクをつける(基本)
- 強制空冷する(ファンをつける)
などが挙げられます。ヒートシンクは、熱設計により形状、材質等々を求めることができます。
強制空冷は、適当にされがちですが、効率よく冷却するには、次のような注意が必要です。
- 発熱部品を一箇所に集めない、かならず間隔をあける
- 内部の空気が乱流となるようにヒートシンク面に対し垂直に風を送る
- または、乱流が発生しやすいように障害物を風の通り道に置く
- 風下には、熱に弱い部品(コンデンサ等)を配置しない
層流よりも空気の接触面積の大きい乱流の方が、熱を効率よく逃がす事ができます。
5、フルブリッジ回路の罠
5.1 ブレーキが、、、
フルブリッジで上側を両方オンにしてブレーキをかけても、ブレーキが全然かからないという現象に見舞われてます。
ちなみに、下側を両方オンにしてブレーキすると、とてつもないほどブレーキが良くかかります。
これは、上側がソースフォロワだからです。
5.2 ソースフォロワ
フルブリッジモータドライバを見た場合、上側のMOSFETは、ソース側が接地してない(ソースフォロワ)
ので、確実にONするには、十分な電圧をゲートに加えてやる必要があります。少なくとも駆動電圧
よりも3V程高い電圧が必要です。よーわからん、ってことで、ちょっと補足説明。
- (1) ソースが接地してるとどうなのさ?
データシートのグラフから、ソース接地出力静特性と、ソース接地伝達性特性を探し出して見てみます。
後者のグラフから、ゲートにかける電圧が3Vもあれば、ドレイン電流の最大値60Aまで使える事がわかります。
ってことは、ソースがグランドに接地しているような回路なら、たった3VでMOSFETをオンできるって事です。
- (2) ソースフォロワだとブレーキがかからないのは何でさ?
フルブリッジの上側は、ソースがモータ側にあります。通常回転の場合、下側がオンになって上側のMOSFETの
ソースがモータを介して接地されるので回ることができます。しかし、下側を両方オフ、上側を両方オン
にしてブレーキをかけようとしても、ドレイン・ソース間の電位差が発生しない、つまりソースも電源電圧と同じ
電位になるので、ゲートに電源電圧をかけても、そのゲート・ソース間電圧は、ほぼ0Vになり、MOSFETがオンしなくなります。
したがって、モータ端子間は、完全に隔離され、ブレーキがかかりません。
このような問題を回避するため、昇圧回路を使ってゲート電位をあげるなどの工夫をするらしいです。
っとまぁ、結論としては、下側を両方オンするってことで、いいんじゃないかなぁ、と(ほんまかいな)。
S-kenがパワーMOSFETを使い始めたのが、2年前のロボコンから。私が扱い始めたのが、去年からで、
パワーMOSFETだけでモータドライバを組んだのは、今年からだったりします。それまでの常識として、
- パワーMOSFETは、ゲートにとりあえず電圧を加えればモータが回せる
ってのがありました。バイポーラトランジスタのような考えを一切用いずに設計していたので、
実際に組みあがったものは、訳わからん挙動をしたり、簡単に燃えたりしてくれたりと悲惨なことに、、
某高専生さんのサイトで公開されていた回路を見ても、何がしたいんだこれ?とか思ってた訳ですが、
今見れば、すげぇ、ちゃんと設計されてるよ、っと思うわけです。
えぇっと、最後に、この文章は私のだめだめな脳みそを振り絞って「かろうじて形になった」といったものなので、
完成したとは思っていません。なにせ、まだあいまいな部分がいくつか残っているので。
そんなわけで、嘘、大げさ、紛らわしい、といった点があれば、S-ken掲示板にでも
つっこんでいただければ、対応したいなぁとは思ってます。でも、あと何ヶ月後には卒業しちゃうんですけどね。
どうやってこの文書のメンテしようかね。困ったもんです。