HEY!御まっち〜
今年も、前回に引き続きロボットランサーに出場した。今年は人数が多いので2班に分け、2つの違った機
体ができた。ここではその2つのうち1つのHEY!御まっち〜について解説する。
最初に考えたアイデアは、コースのスタートゲートと一番近い的のポールをはさんで回り、その的だけをひたすら
打ち続けるものだった。これは、本部に問い合わせてみると、反則ということがわかったので断念した。これ
を大会に出すには、
スタート時にポールをはさんで円形にならなければならない。
スタートゲートをくぐるときは先頭と後部を切り離さなければならない。
という大きな2つの問題を解決しなければならなかったのだ。
次の案はかなり時間がたってからだった。
ロボットランサーは、コースを周回しながら途中いくつかある的をついて得点を競うものである。1年古井の、
周回→回る→お寿司
という安直な連想と、われらがS−kenのチーフ顧問である町田教官の名をもじって、
HEY!御まっち〜
となってしまった。
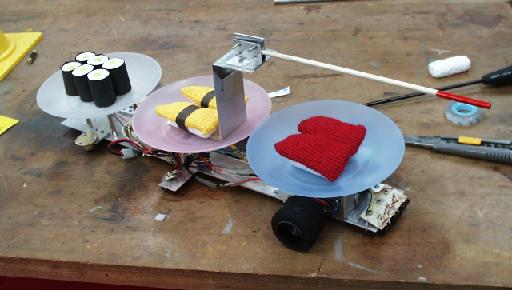
『HEY!御まっち〜』はまたも古井の案で、ネタはマグロ、たまご、かっぱ巻き、という構成に決まった。単にどれが
毛糸で編みやすいかということでの選択だった。
四つとなったのは、百円均一で買ってきたお皿が4枚組みだったのと、それだけあれば空間は十分にできた
からだ。もうひとつ、円筒を倒すために、あがりをつけようとなっていたが、回路が出来上がらず、断念した。
このあがりは本当に時間をかけて作ったので残念でならない。
『HEY!御まっち〜』は基本のハードを3S東小路が、ソフトを1年古井が、その他雑多なことを1年安達
が担当した。
夏休みに入ってから本格的に活動し始めたので、ほとんど設計が出来上がっていなかった。
よって、夏休みの3分の一、もしくは半分が設計に費やされていた。もっと早くにはじめればこんなことにはなら
なかったのかもしれない。ギヤボックスは、かなり初期のほうで設計されていたが、NCフライスが使える時期が
遅かったのと、3回の設計変更もあって、完成したのは夏休みがあけてからだった。
夏休みで、基本のハードがほぼ完成にもって行きたかったが、上がりの設計に手間取り、結局出場一週間く
らい前に完成となった。おかげで回路の検証がほとんどできず、まともに動かすのさえ困難となった。この点で
ソフトには迷惑をかけたと思う。
回路は、最初本に載っていた回路を使ってみたがうまく反応せず、確実に動作するはずだった去年の回路
ですらあまり線を読んでくれなかった。最後は、センサを最新の方に変えることでやっとまともに読んでくれた。
センサ回路は、74HC14で42KHz発振し、それを2SC1815で増幅しセンサの電源とした。反射型フォトインタラプ
タのフォトトランジスタ側に2SC1815をダーリントン接続し、7414で整形してPICに入力した。4S倉野さんによると、
74ICの入力電流を超えているので危険だということだったが、とりあえず動いていた。
1年古井がプログラムをしたいということで、あえて難しい、PICでPWMとRCサーボを同時に制御するというこ
とになった。本当だったらPWM専用にPIC12C509を使う予定だったが、回路が簡単になるので了承した。
一応プログラムはできたが、回路が悪いのかプログラムが悪いのか、しっかりとは動いてくれなかった。
後の町田教官の授業によると、PWM制御をするときは14KHz以上でないとモーターが鳴るらしいが、プログラ
ムでは1KHzになっており、しっかりと鳴っていた。
最終的に、動かなかった原因は、モータードライバICの足が会場で折れ、急遽付け替えたのと、半田付け不良
によりGNDが取れてしまったことだった。
設計が悪く、機体の製作に大部分の時間を使ってしまったのが敗因と思われる。これからは、まず設計の勉
強をしてから取り掛かるべきだろう。回路は今回が初めてのまともな回路の設計だったので、いい勉強になっ
た。動かなかったのは残念だが、こういうことの積み重ねによってうまく動くものがはじめて作れるようになるの
だろう。
Back