ロボットの紹介 (Introduction of our Robots)
- 平成12年出場マシン "MNCT"
- ロボフェス班初のロボットは、ステッピングモータを使って槍を制御していました。
しかし、槍があまりに大きかった為、うまく制御することができませんでした。さらに、コースの読み取り
がうまく出来ず、まっすぐ走ることすら出来ませんでした。制御には全て、PICマイコンを用いました。
クリックすると拡大画像が表示されます。
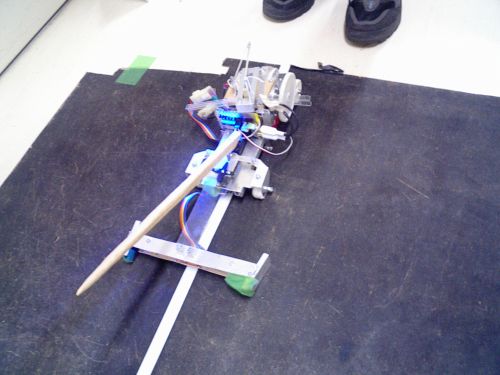
- 平成13年出場マシン "MNCT2"
- 前のマシンと異なる点は、ステアリング機構を用いた点と、槍の制御をRCサーボモータに
変えた所です。制御には、前年に引き続きPICを用いました。大会では、予選時にセンサが曲がってしまい、
決勝戦ではうまく走行出来ませんでしたが、何とか得点することが出来ました。
クリックすると拡大画像が表示されます。
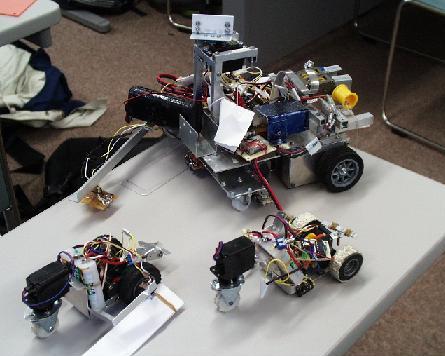
平成14年出場マシン(藤井班) "MNCT3 〜 Swordfish 〜"
- 第6回ロボットグランプリのロボットランサーには電子制御研究会からは2チームが参加しました。
そのうちのひとつがこの「MNCT3〜Swordfish〜」です。
このマシンは、モチーフにメカジキを選び、新機軸として
子機を導入しました。しかしその子機のテストが不十分なまま本番を迎え、
親機のマシントラブルも重なり、予選で無得点のまま敗退しました。
クリックすると拡大画像が表示されます。
MNCT3〜Swordfish〜 特別ページ
平成14年出場マシン(東小路班) "HEY! 御まっち〜"
- もうひとつはこの「HEY!御まっち〜」です。
クリックすると拡大画像が表示されます。
HEY!御マッチ〜 特別ページ
平成17年出場マシン(樋本班) "F(フォルテ)"
- 第9回ロボットグランプリのロボットランサーには電子制御研究会からは
2チームが参加しました。

クリックすると拡大画像が表示されます。
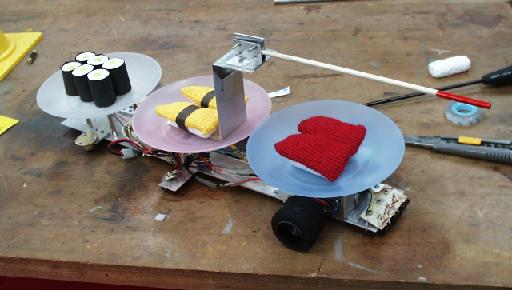
平成17年出場マシン(西本班) "TaVirSco〜cero〜"
- この「TaVirSco〜cero〜」は、西本・芦田・熊谷が初めて作ったマシンです。結果はよくなかったが三人にとって良い経験になりました。
クリックすると拡大画像が表示されます。
TaVirSco〜cero〜 特別ページ
Back